
Why So Many Embodied AI Startups Start with RealSense Cameras ?
Published:
Originally published on Substack.
If π0.5 (Physical Intelligence) can learn from videos as small as 240×320, why do so many embodied AI startups begin with RealSense cameras instead of using a cheap webcam or building their own camera solution?
The more time I spend in robotics, the more I think this isn’t really a camera question.
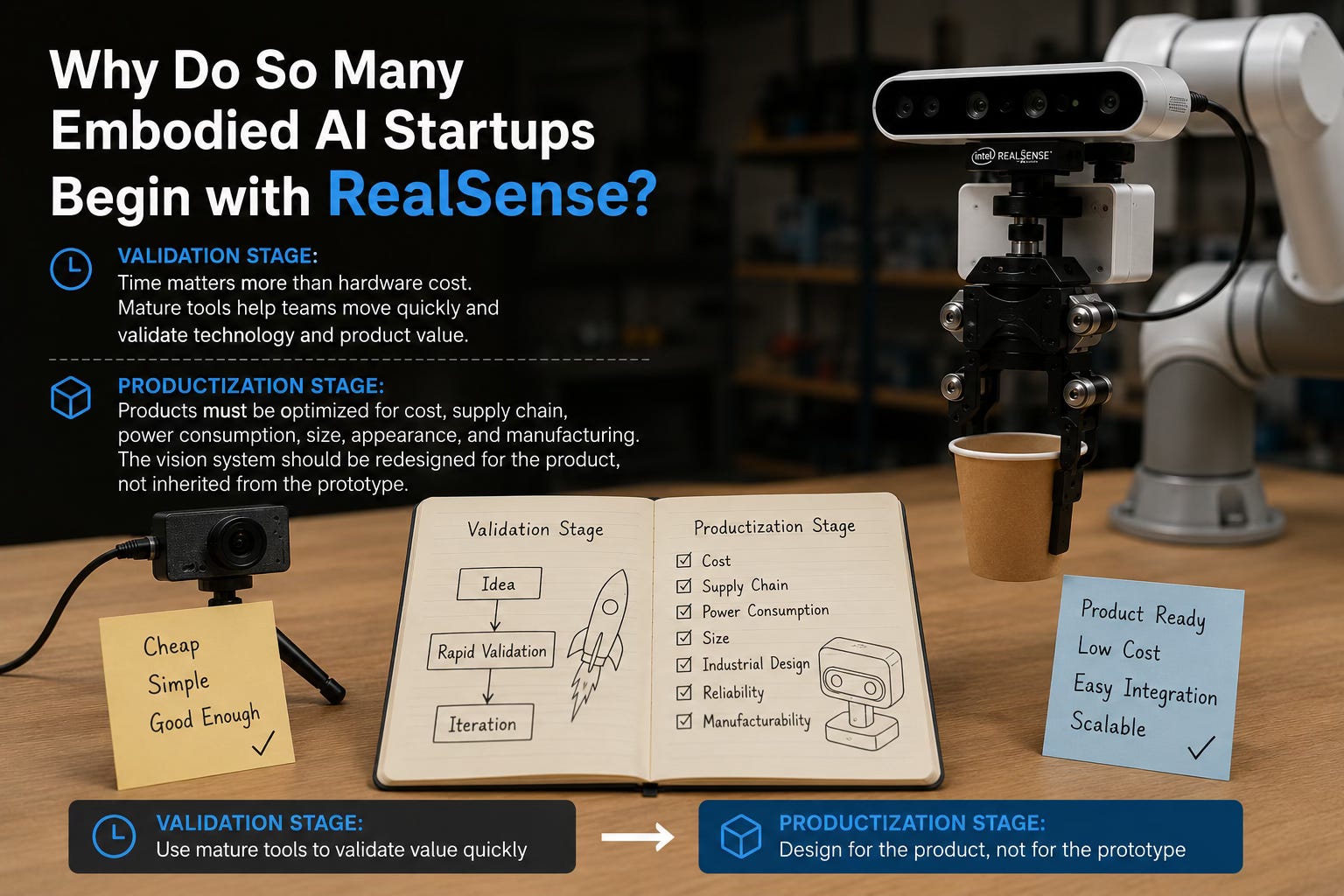
It’s a startup-stage question.
Early-stage startups are rarely buying hardware.
They’re buying time.
A basic camera can absolutely capture video. But once you start building a robot, the camera itself is only a small part of the problem.
You still need drivers, calibration, synchronization, ROS integration, data pipelines, debugging tools, and long-term maintenance.
None of these problems are particularly difficult on their own, but together they can consume weeks or months of engineering effort.
For a startup trying to validate a product, a few months of engineering time are usually far more expensive than a few hundred dollars of hardware.
That’s why RealSense became so common.
You plug it in and immediately get RGB images, depth information, calibration tools, SDK support, and a huge community that has already solved many of the problems you’re about to encounter.
Instead of becoming camera experts, teams can focus on collecting data, training models, and understanding customer needs.
What’s interesting is that recent progress in imitation learning and VLA models has also shown that many robotics tasks don’t require the visual quality people once assumed.
For tasks like grasping objects, opening drawers, organizing items, or basic manipulation, stable data often matters more than ultra-high-resolution images.
In that sense, RealSense is often a very reasonable choice for the validation stage.
But that doesn’t mean it should stay forever.
One mistake I occasionally see is treating a development tool as a product component.
When a company begins productization, the conversation changes completely.
The question is no longer:
“Can this work?”
The questions become:
* Can we manufacture it at scale?
* Is the supply chain reliable?
* Is the power consumption acceptable?
* Does it fit the industrial design?
* Is the cost appropriate for our target market?
* Can it be serviced and maintained efficiently?
These are product questions, not research questions.
At that point, the vision system should be re-evaluated from the ground up.
The best camera for development is not necessarily the best camera for production.
Some products may only need low-cost RGB cameras. Others may require custom stereo systems. Some may use multiple cameras distributed across the robot. The right answer depends entirely on the product and its use case.
Personally, I think the transition should happen much earlier than many teams expect.
Not at the thousandth robot.
Not after mass production starts.
The moment a company commits to a product direction and enters productization, it should begin designing the vision system around manufacturing, cost, power consumption, industrial design, and supply-chain realities.
RealSense is an excellent development tool.
A product, however, should be designed for customers, manufacturing, and scale.
Those are very different goals.
In robotics startups, it’s easy to optimize too early for hardware cost and miss the bigger picture.
The real objective in the beginning is not building the perfect camera system.
It’s finding something customers actually want.
Once you’ve found that, then it’s time to build the camera system your product truly needs.